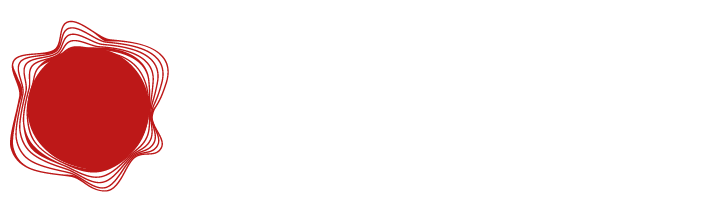
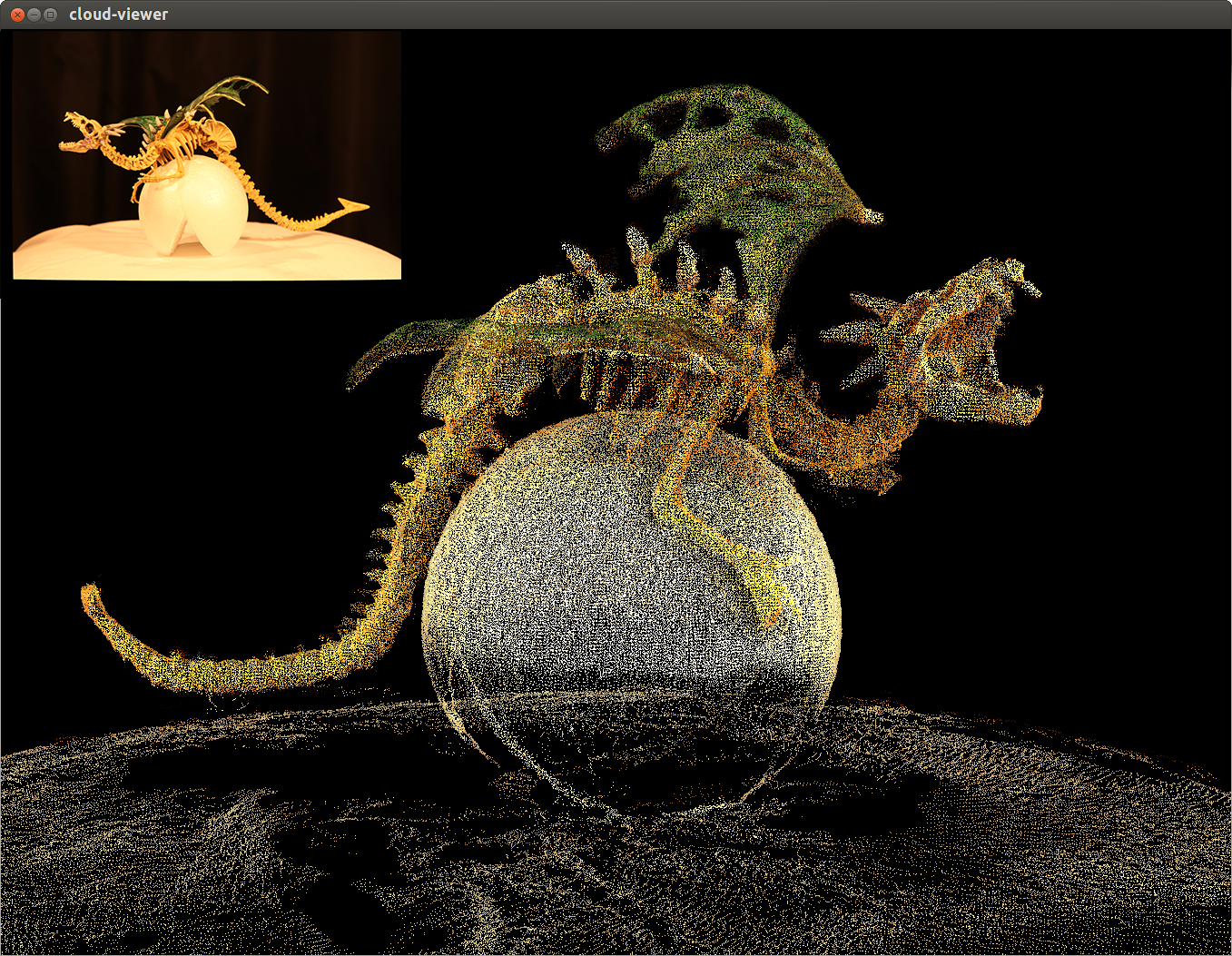
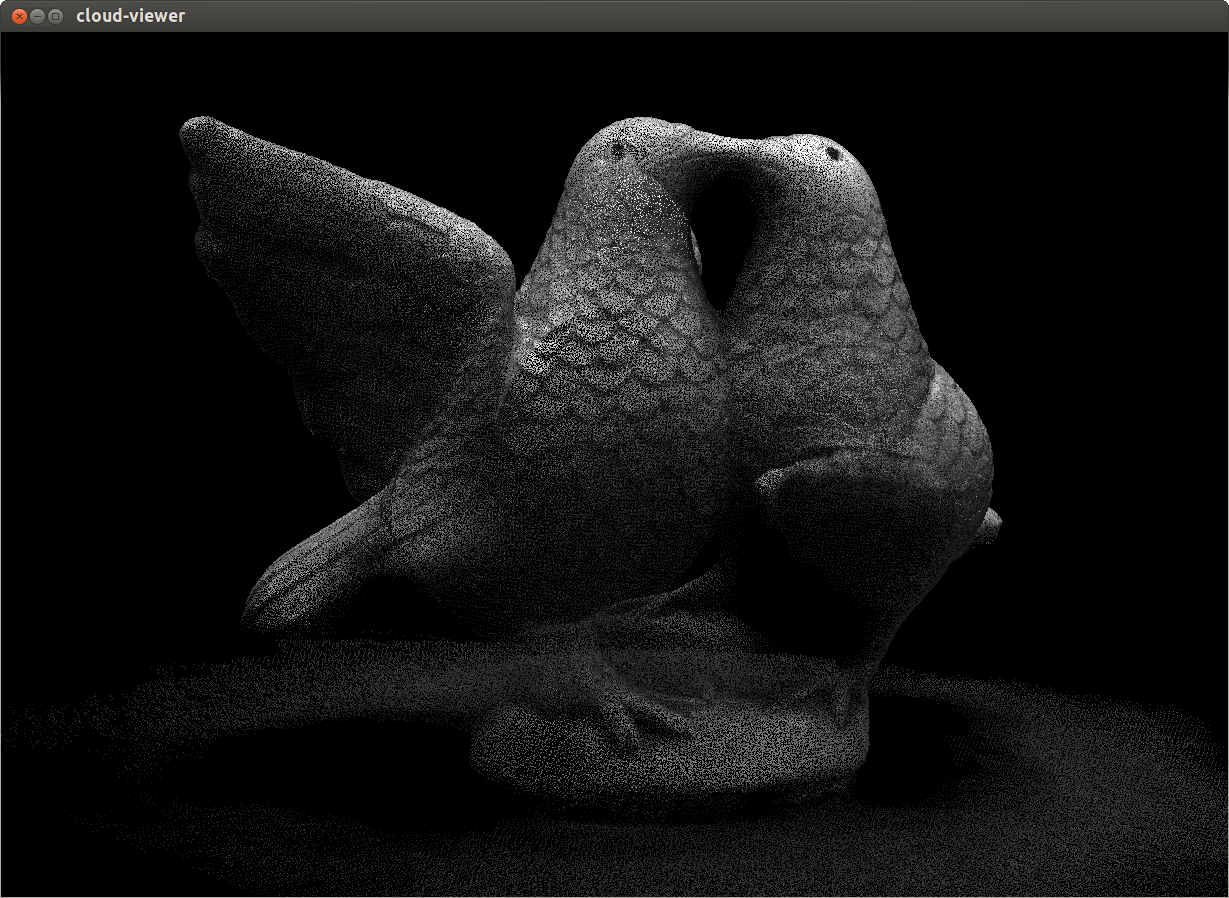
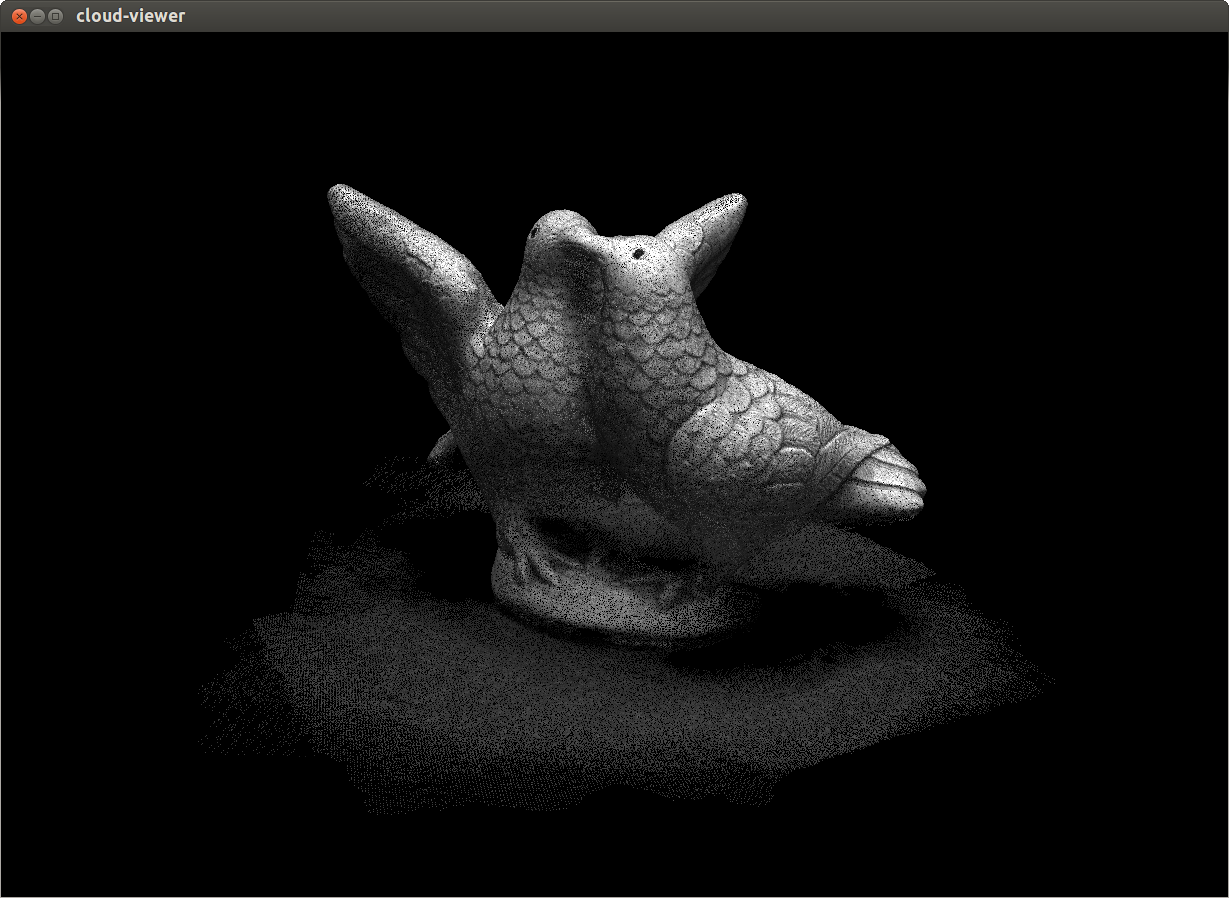
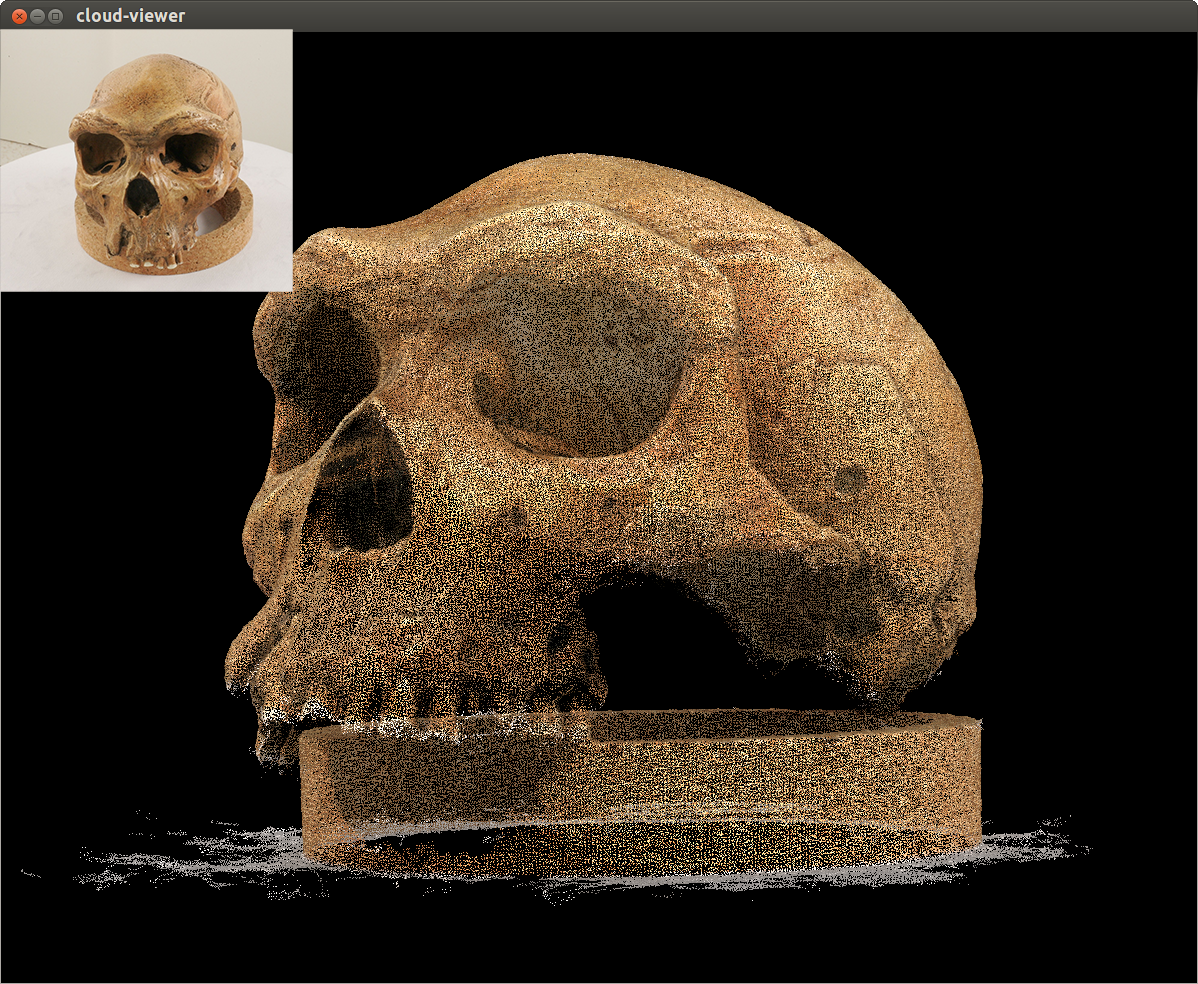
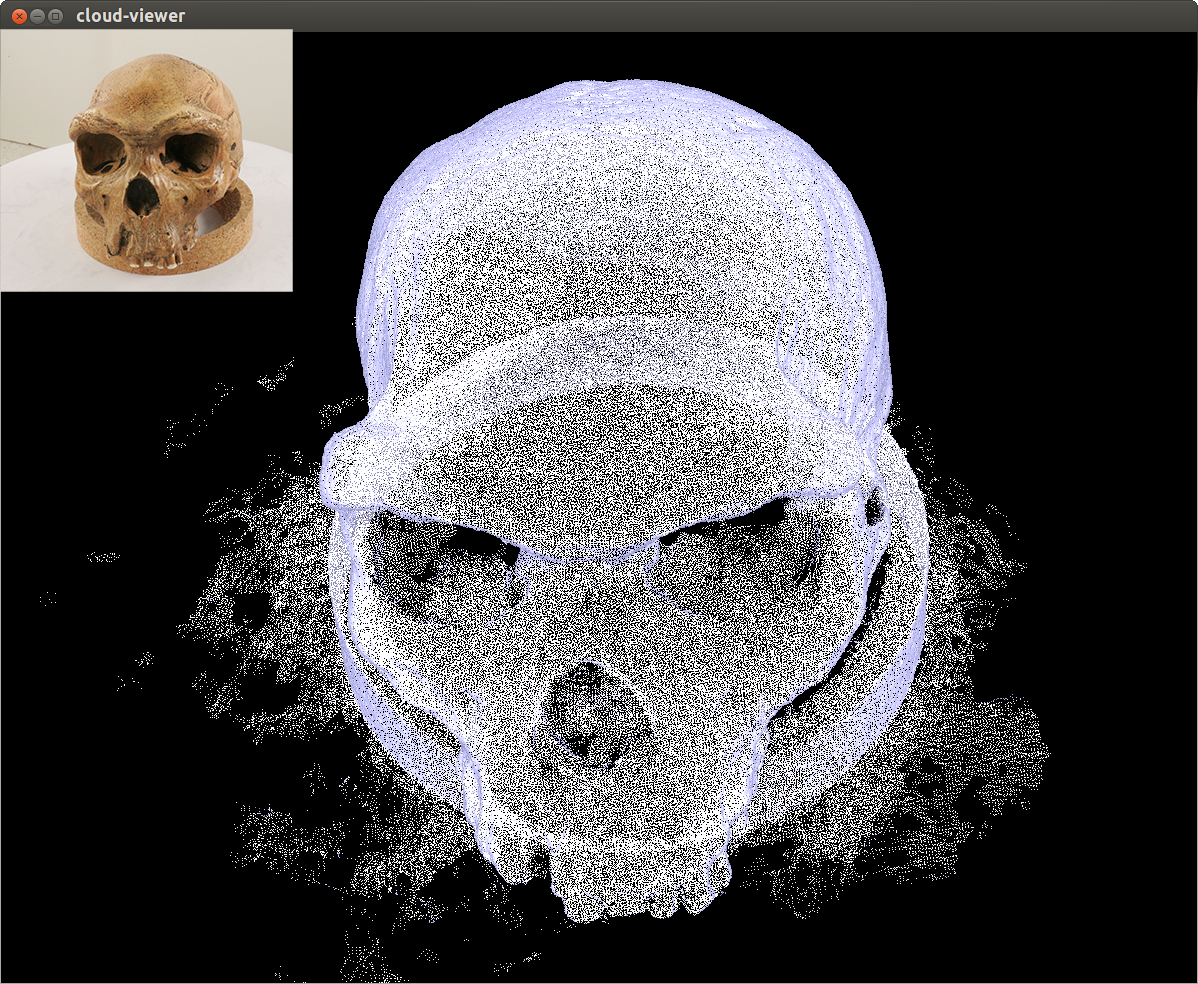
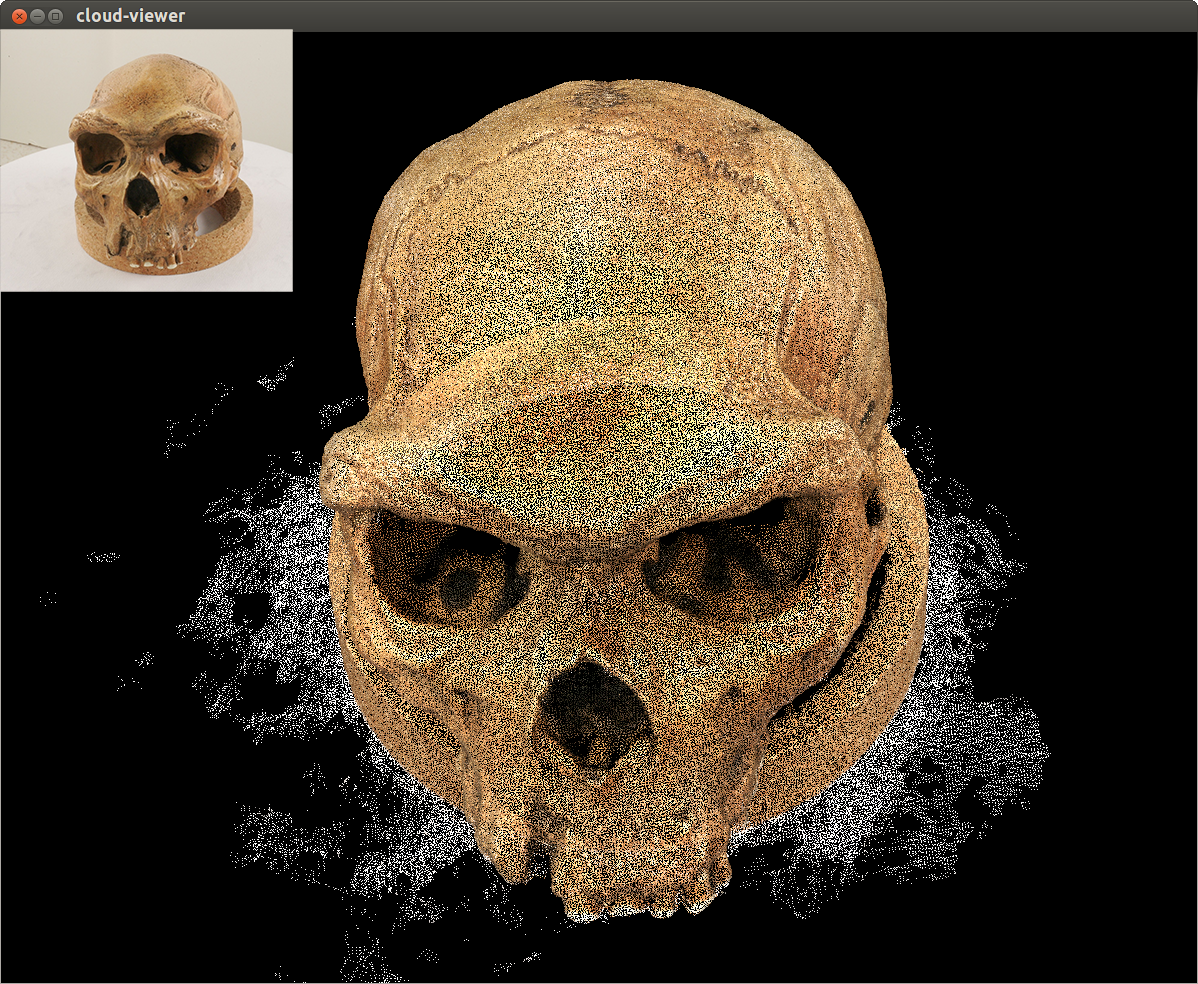
Our software not only generates colored dense point clouds but also extracts statistics like sampling density, curvature and surface normal information at each vertex location. This allows to use the generated models directly in graphics animations or industrial metrology applications or to use them directly to make digital elevation models.
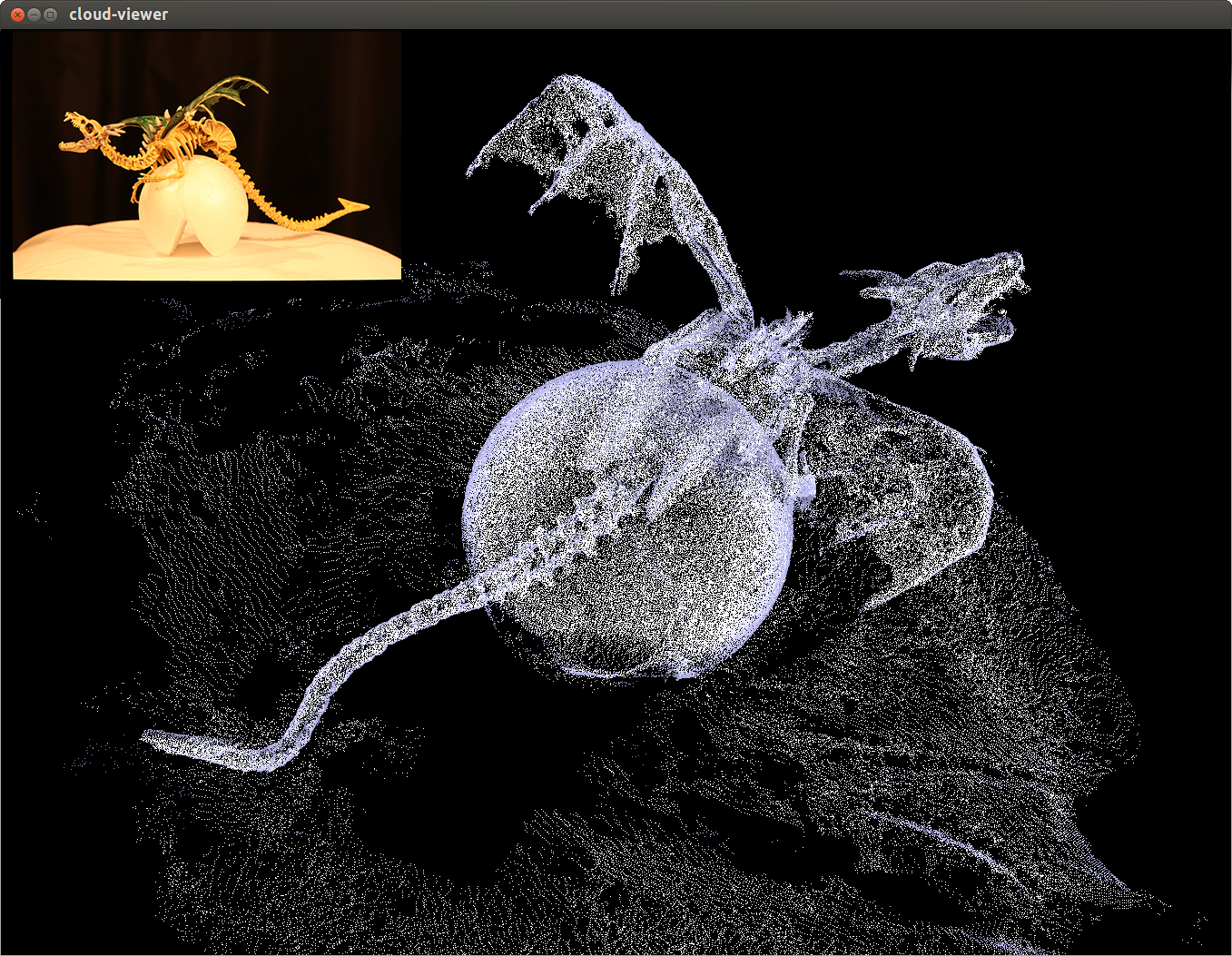
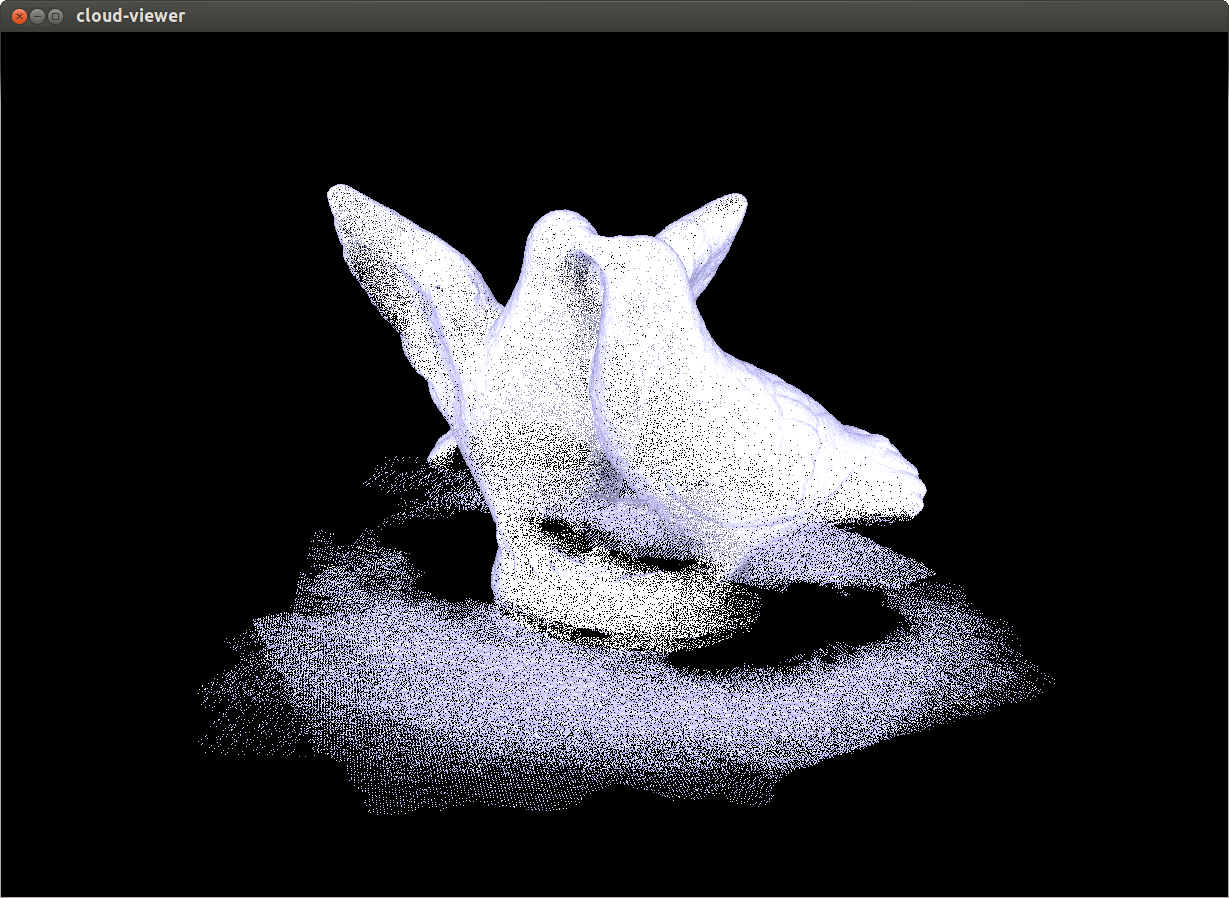
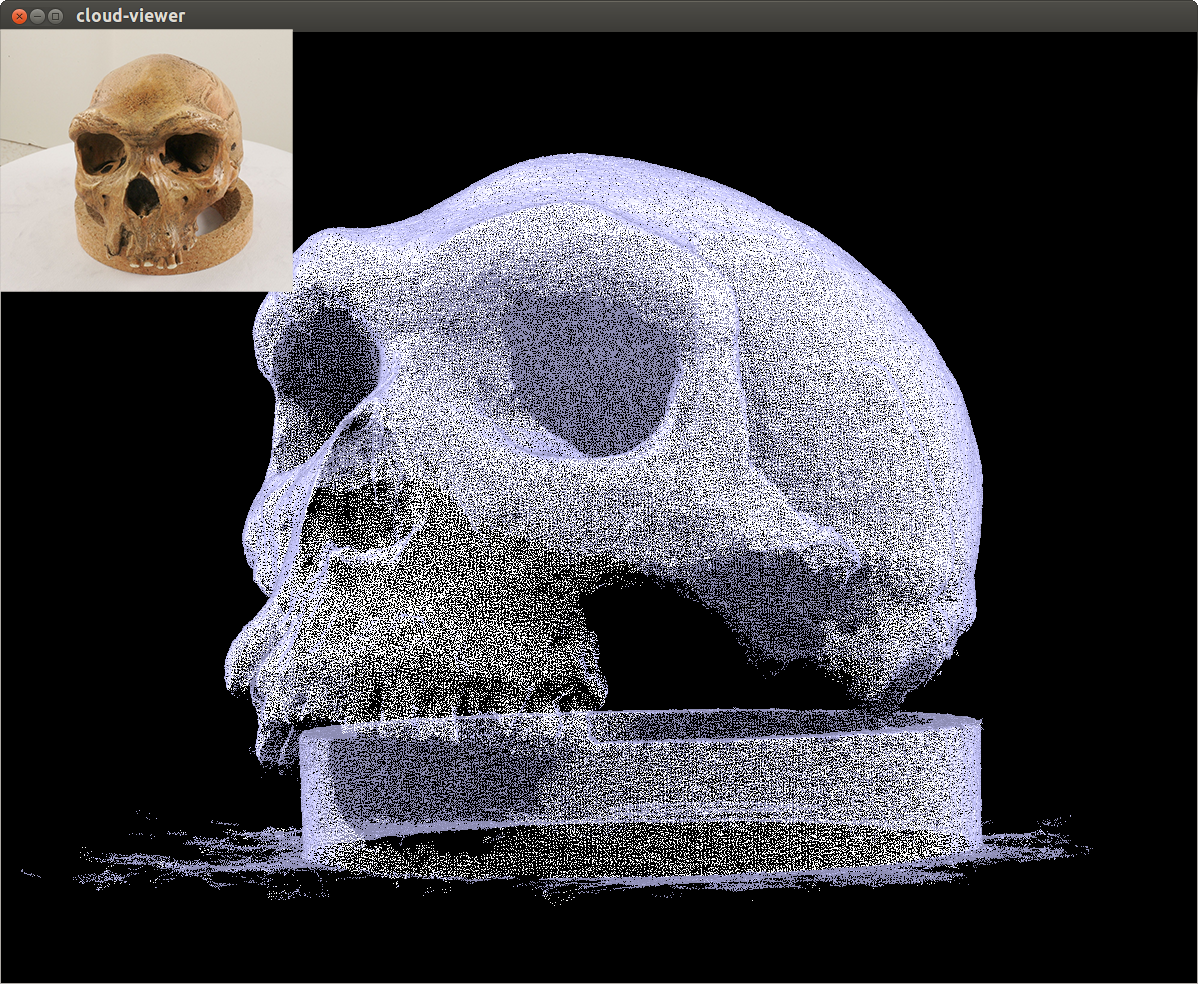
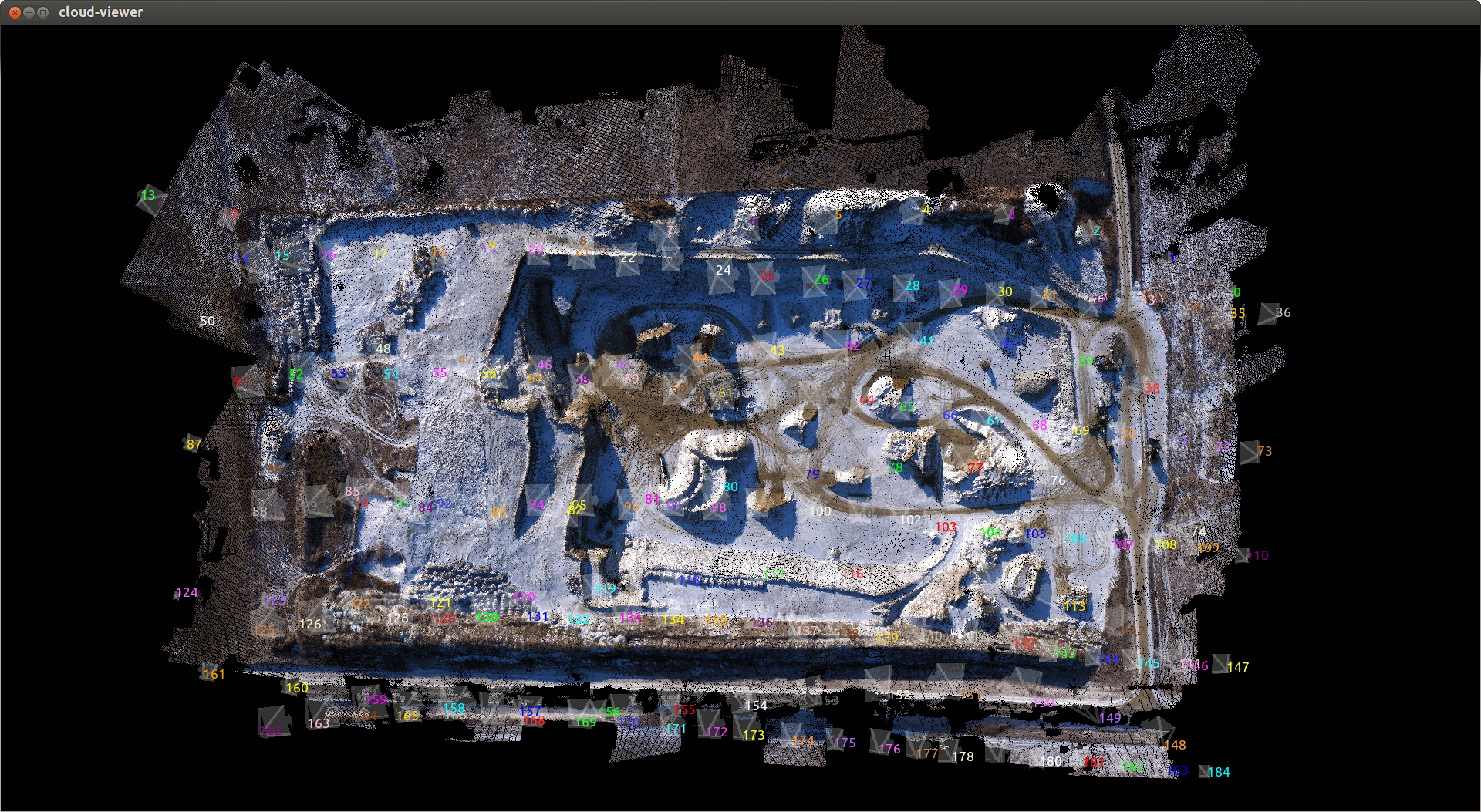
Moreover, it is even possible to generate models with user-specified sampling density or with a preset number of points, or to downsample or upsample a given point cloud without losing the surface structure. Therefore, it is suitable to generate low resolution but high quality models for memory sensitive tasks.